Новая система управления тормозами для электропоезда ЭС2Г «Ласточка» с уровнем автоматизации УA4
23
ноября
2022
|
Более шести лет назад на АО МТЗ ТРАНСМАШ была разработана отечественная тормозная система для скоростных электропоездов «Ласточка». Система была разработана в кратчайшие сроки всего за восемь месяцев. На данный момент выпущено более 900 вагонов электропоездов «Ласточка», оборудованных данной тормозной системой, которые отлично зарекомендовали себя на сети железных дорог Российской Федерации. Летом 2019 г. началось обсуждение планов создания более совершенного подвижного состава на базе электропоезда ЭС2Г для эксплуатации на Московском центральном кольце в автоматическом режиме эксплуатации без машиниста. Немного позднее с целью оценки возможности реализации данного проекта была создана рабочая группа, в которой АО МТЗ ТРАНСМАШ приняло активное участие. Результатом деятельности данной группы явилось создание технических требований к различным системам электропоезда с управлением без машиниста, а также нормативно-технической документации, так как до сегодняшнего момента в стране отсутствовали правовые документы, регулировавшие требования к подвижному составу с различными уровнями автоматизации. Другими словами, одновременно с созданием инновационного электропоезда происходила научно-исследовательская работа по формированию фундамента для будущих подвижных единиц с функциями беспилотного движения. Итогом этой работы в рамках разработки тормозной системы с уровнем автоматизации УА4 стало сначала создание макетных образцов системы, которые были продемонстрированы на Международном железнодорожном салоне «PRO// Движение.Экспо» в Щербинке в 2021 г., а в последующем принятие в мае 2022 г., в рамках приемочной комиссии с участием ОАО «РЖД», крупнейшего производителя электропоездов ООО «Уральские локомотивы» (г. Верхняя Пышма Свердловской обл.), а также АО «ВНИИЖТ» и ряда других организаций. Разработанная система позволяет управлять тормозной системой в трех основных режимах: — управление машинистом (по аналогии, как в настоящее время); — дистанционное управление оператором, который находится вне кабины машиниста; — автоматическое управление движением поезда без участия человека. В процессе разработки тормозной системы было принято решение взять за основу уже существующую тормозную систему электропоезда ЭС2Г «Ласточка» и модернизировать ее конструкцию с учетом новых требований. Новая система управления тормозами для электропоезда серии ЭС2Г с уровнем автоматизации УA4 включает в себя следующие приборы: — кран машиниста № 345Б; — блок экстренного тормоза № 093Б; — блок тормозного оборудования № 420Б(К); — блок пневматического оборудования № 425Б. Основные элементы, входящие в состав крана машиниста № 345Б (КМ) представлены на рис. 1. Основная функция КМ — управление давлением сжатого воздуха в тормозной магистрали (ТМ) электропоезда. У базового изделия данная функция реализовывалась только в ручном режиме посредством ККМ машинистом. В модернизированном варианте КМ появилась возможность электронного управления давлением сжатого воздуха в ТМ электропоезда. С этой целью были установлены блок электропневматических вентилей и электронный блок управления краном машиниста. Одновременно были расширены возможности диагностики работоспособности системы посредством дополнительных датчиков давления. На функциональной схеме (рис. 2) более подробно показан принцип электронного управления ТМ электропоезда. 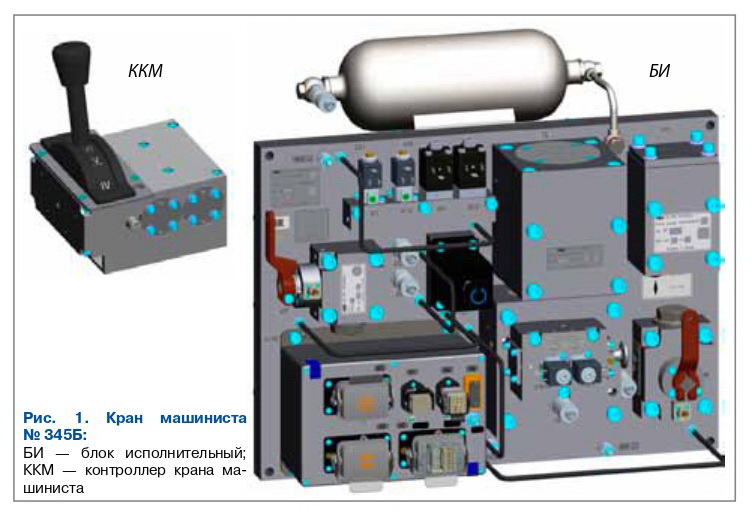 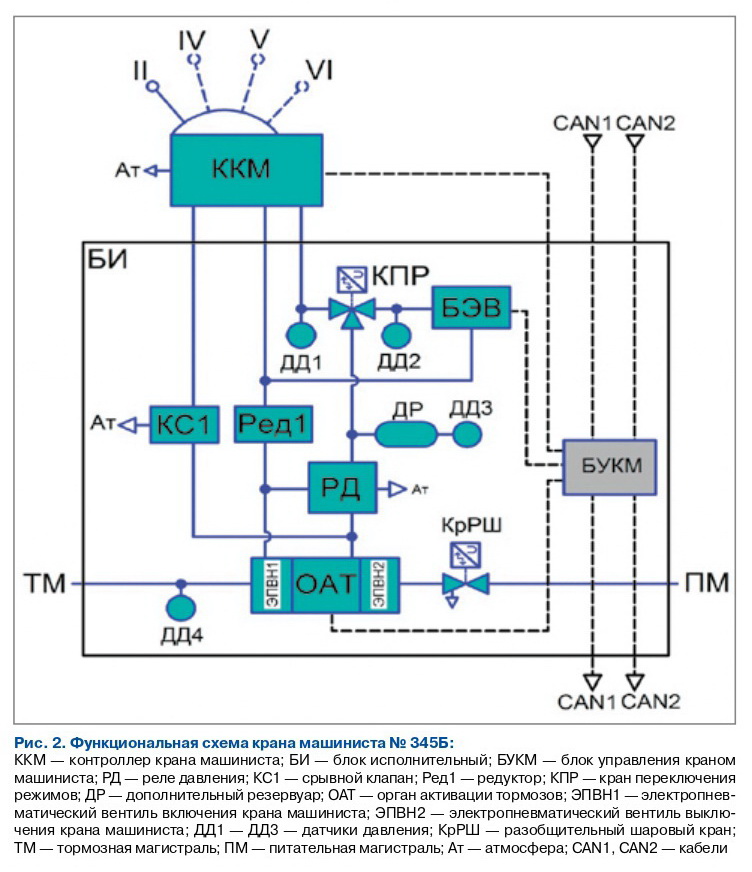 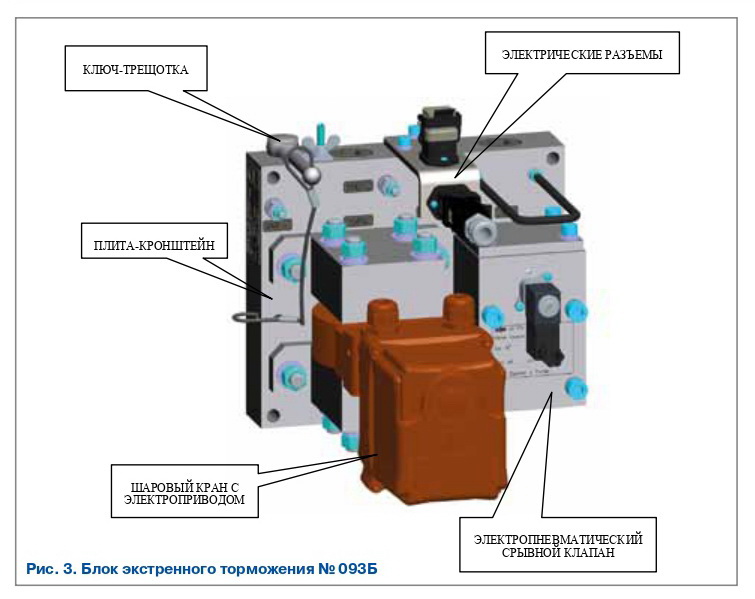 Данная функция реализуется с помощью вышеуказанных приборов следующим образом. Электронный БУКМ управляет электропневматическими вентилями, которые входят в состав БЭВ. В случае подачи напряжения на соответствующие вентили происходит наполнение ТМ. При снятии напряжения с вентилей происходит разрядка ТМ служебным темпом. Команды на ступени разрядки и зарядки ТМ электронный блок получает от системы управления. Далее вышеуказанным алгоритмом электронный блок выполняет команды. Другими словами, микропроцессорная система управления электропоездом имеет возможность быстро и эффективно оценивать давление в ТМ, а также управлять с точностью до ±0,01 МПа. 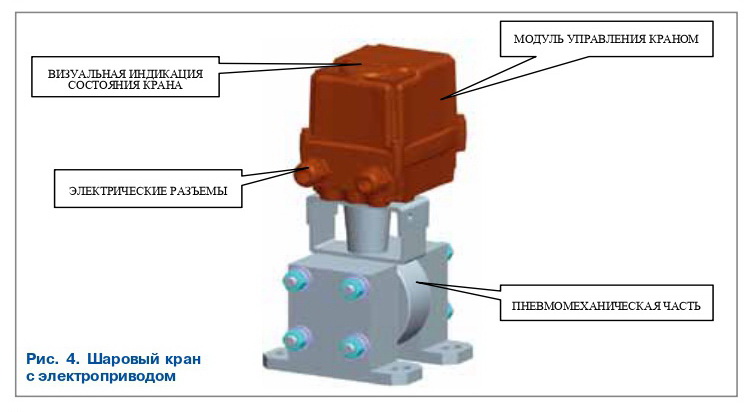 Блок экстренного торможения № 093Б (БЭТ) является исполнительным элементом непрямодействующей «петли безопасности». Основные элементы, входящие в состав БЭТ, приведены на рис. 3. Основная функция данного блока — экстренная разрядка тормозной магистрали по сигналам системы управления электропоезда. Ранее этот элемент входил в состав серийного крана машиниста № 345. Этот прибор работает в паре с краном машиниста № 345Б, так как одновременно с разрядкой ТМ происходит отключение КМ № 345Б для исключения подпитки и разрядки ТМ. Блок экстренного торможения № 093Б (БЭТ) является исполнительным элементом непрямодействующей «петли безопасности». Основные элементы, входящие в состав БЭТ, приведены на рис. 3. Основная функция данного блока — экстренная разрядка тормозной магистрали по сигналам системы управления электропоезда. Ранее этот элемент входил в состав серийного крана машиниста № 345. Этот прибор работает в паре с краном машиниста № 345Б, так как одновременно с разрядкой ТМ происходит отключение КМ № 345Б для исключения подпитки и разрядки ТМ.Отличительной особенностью БЭТ является применение шарового крана с электроприводом (рис. 4). Данный кран позволяет открывать и закрывать пневматические контуры дистанционно. В случае отсутствия возможности штатного управления в конструкции предусмотрен ручной способ. Для этой цели в конструкции БЭТ предусмотрен ключ-трещотка. В состав блока тормозного оборудования № 420Б (БТО) входят следующие основные элементы (рис. 5): — защитный кожух; — дисплей; — источник питания; — электронный блок; — противоюзная система; — исполнительная часть. БТО выполняет следующие основные функции: — управление давлением воздуха в тормозных цилиндрах в различных режимах торможения; — авторежимное регулирование давления в тормозных цилиндрах в зависимости от населенности вагона; — управление давлением воздуха в цилиндрах стояночного тормоза; — обеспечение давления воздуха в системе пневмоподвешивания; — потележеное независимое электропневматическое торможение (ЭПТ); — расширенную диагностику; — регистрацию параметров тормозной системы. На рис. 6 показана функциональная схема БТО № 420Б. 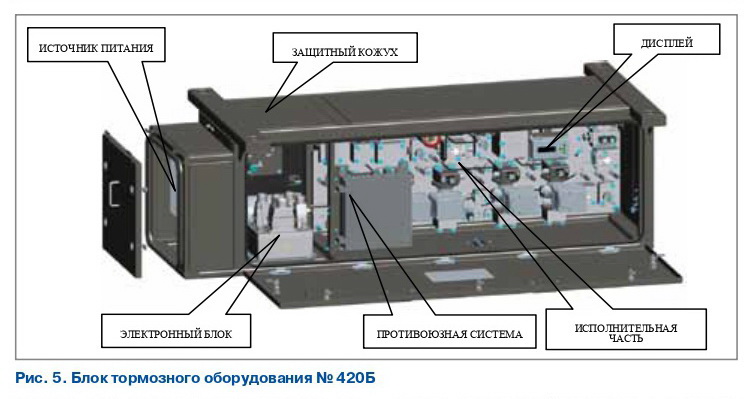 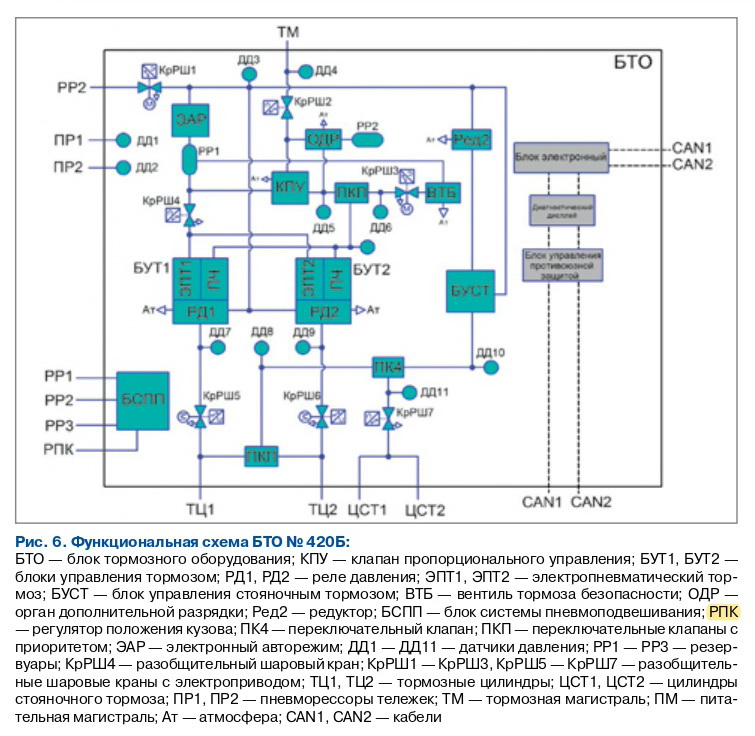 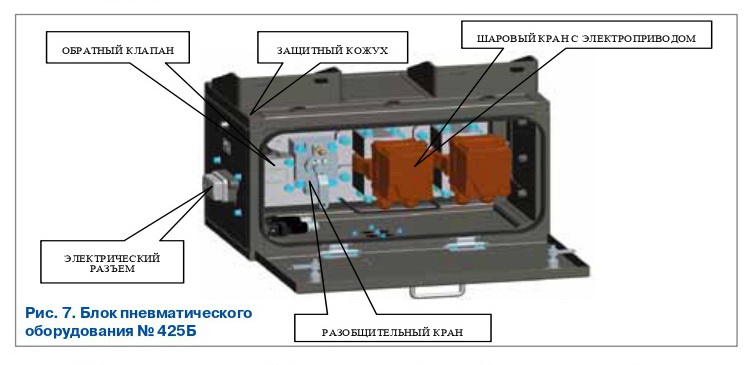 Блок пневматического оборудования № 425Б (рис. 7) предназначен для отключения пневматических каналов компрессорного агрегата при помощи разобщительных кранов, а также сообщения ТМ и ПМ через обратный клапан при следовании электропоезда «холодным резервом». На рис. 8 показана функциональная схема БПО № 425Б.  В заключение хотелось бы отметить, что ведущие страны мира уделяют значительное внимание созданию беспилотных подвижных единиц на железнодорожном транспорте. В последние годы и в нашей стране начался процесс создания беспилотного железнодорожного транспорта. Пока это только начальная стадия развития. Одним из основных элементов любого транспорта и, в частности, железнодорожного, является тормозная система, без которой невозможно даже представить движение. Начав двигаться, мы должны быть уверены, что у нас есть возможность остановиться. В заключение хотелось бы отметить, что ведущие страны мира уделяют значительное внимание созданию беспилотных подвижных единиц на железнодорожном транспорте. В последние годы и в нашей стране начался процесс создания беспилотного железнодорожного транспорта. Пока это только начальная стадия развития. Одним из основных элементов любого транспорта и, в частности, железнодорожного, является тормозная система, без которой невозможно даже представить движение. Начав двигаться, мы должны быть уверены, что у нас есть возможность остановиться.Совершенствование автоматических тормозных систем железнодорожного транспорта в первую очередь будет связано с разработкой современных алгоритмов управления с применением искусственного интеллекта. На данный момент одновременно с созданием новой тормозной системы приходится решать вопросы по замене иностранных комплектующих на отечественные. Несмотря на все возникающие трудности, с которыми столкнулись специалисты АО МТЗ ТРАНСМАШ, в текущем году на первом этапе создания новой тормозной системы беспилотной «Ласточки» все задачи, поставленные заказчиком в лице ОАО «РЖД», были выполнены точно в срок. |
Вернуться в Архив новостей